操作系统中的进程
在计算机科学的教科书中,关于进程(Process)的定义往往只有冷冰冰的一句话:
进程是程序的一次执行过程。
这句话虽然准确,但它掩盖了太多细节。对于初学者而言,这更像是一个黑盒。为什么要有进程?为什么不能直接操作物理地址?所谓的上下文切换到底切换了什么?
要真正理解进程,我们不能只看定义,而必须回到计算机发展的历史,从本质出发,看看是怎样的资源瓶颈和物理限制,逼迫工程师们发明了进程这个概念。
0. 起点:硬件即程序
| 时间背景 | 代表 |
|---|---|
| 1940s - 1950s 初 | ENIAC |
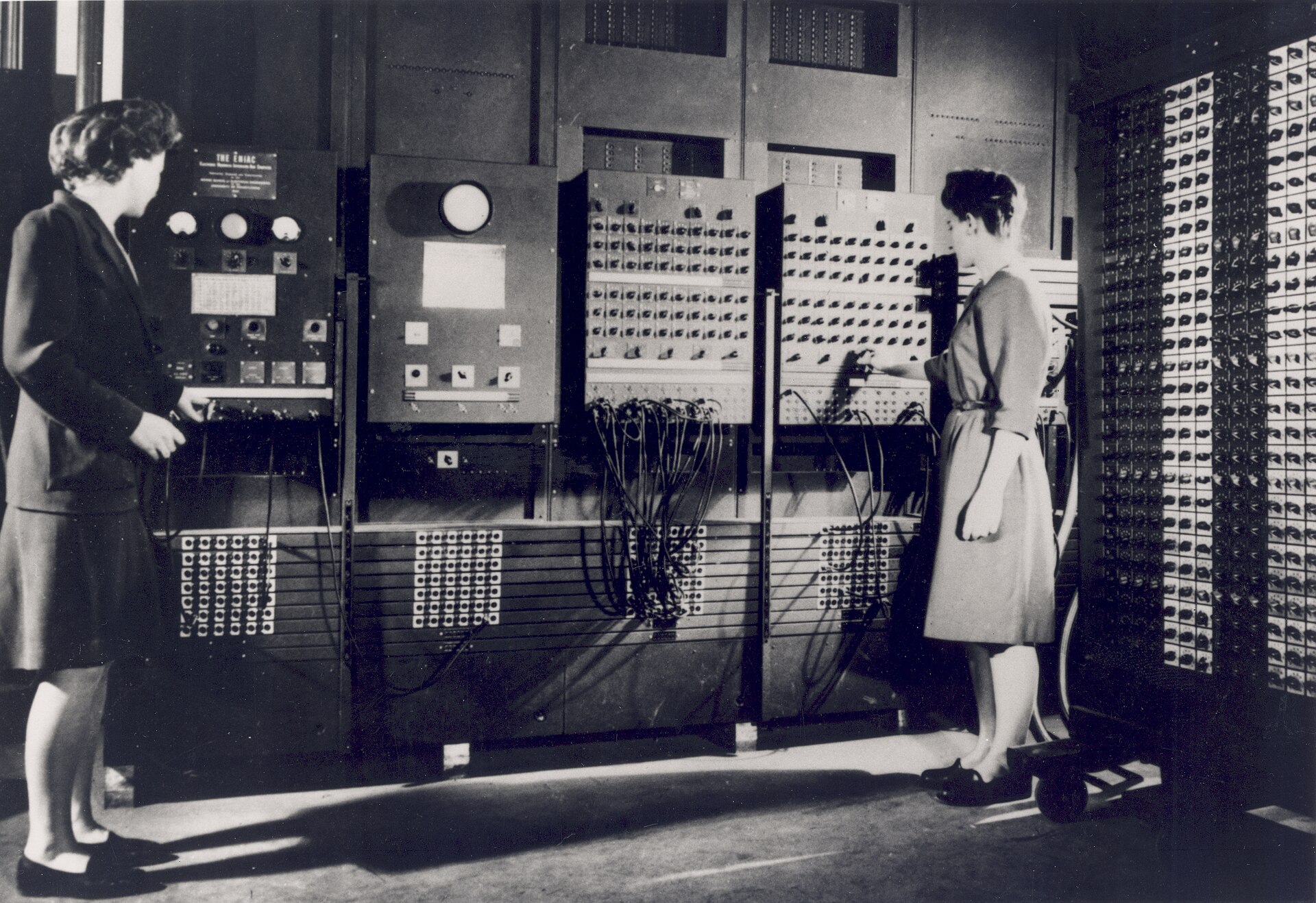
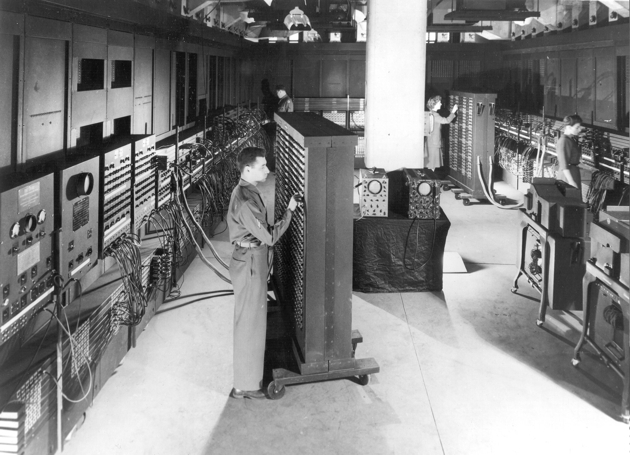
在进程这个概念诞生之前,计算机的世界是纯粹且静止的。如果非要为这个 “史前时代” 选一个代表,那非 ENIAC(Electroinc Numeric Numerical Integrator and Computer,电子数值计算机)莫属。在这个阶段,软件和硬件之间并没有明显界限,甚至可以说,根本没有现代意义上的“软件”。
想象一下,你面对的是一个占地 167 平方米、重达 27 吨的庞然大物。这就是 ENIAC,它是那个时代算力的巅峰,但对于 “任务管理” 而言,它确实最原始的形态:它没有任何中间层来管理资源;同一时间,这台巨兽只能为解决一个问题而存在。
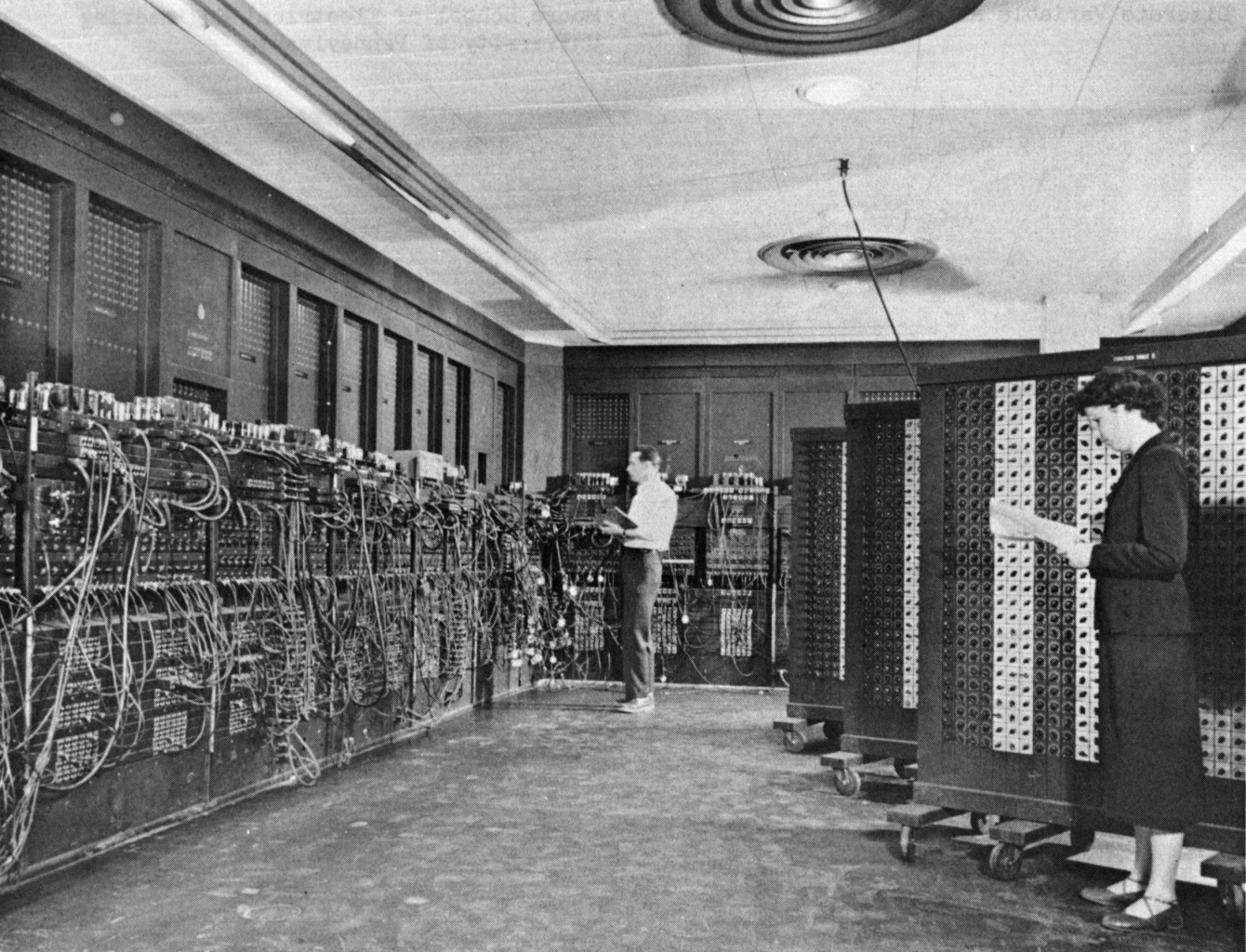
在 ENIAC 上 “切换任务” 并不是像今天一样双击一个图标一样简单。那是一场体力劳动。当时的 “编程”,实际上就是 “接线”。
程序员(通常是女性数学家)需要拿着粗大的连接线(Patch Cables),在巨大的配线板上进行物理连接。每一个插孔的连接,每一排开关的拨动,都代表着指令的逻辑流向。当你把线插好,这台机器就变成了解决那个特定方程的专用电路。
似乎有点类似于现在的 FPGA。
既然没有操作系统,那谁来切换任务呢?那自然也只能让人来手动切换了。
在这个时期,ENIAC 的加法速度已经高达 5000 次/秒,但准备计算的过程确慢得令人发指。而正是这种极高的计算速度与极低的任务切换效率之间的巨大鸿沟,成为了推动计算机科学向前发展的原动力。
1. 第一次进化:消除人的延迟 —— 批处理系统
| 时间背景 | 代表 |
|---|---|
| 1955 - 1960s 初 | GM-NAA I/O(为 IBM 704 开发) |
1945 年,随着 John von Neumann 在其里程碑式的著作《First Draft of a Report on the EDVAC》中正式确立了冯·诺依曼架构,程序终于从繁琐的硬件连线进化为存储在磁带上的指令。虽然这一边个消除了物理插拔线缆的需求,但在早期的 Open Shop(开放式机房)模式依然由人主导:程序员带着磁带走进机房,装带、运行、卸带、离开,然后下一个人进来。

当时的 CPU(如 IBM 704)如同黄金般珍贵。人的动作(装磁带、按按钮)可能需要花费几分钟,但 CPU 可能几秒钟就执行完毕。
让一台每秒运行数万次指令的 CPU 停下来等人,这是对计算资源极大的浪费。为了解决 “人太慢,CPU 等人” 的矛盾,批处理系统(Batch Processing)应运而生。
1956 年,通用汽车(GM)的研究部门为 IBM 704 编写了 GM-NAA I/O,这被认为是世界上第一个真正意义上的操作系统。
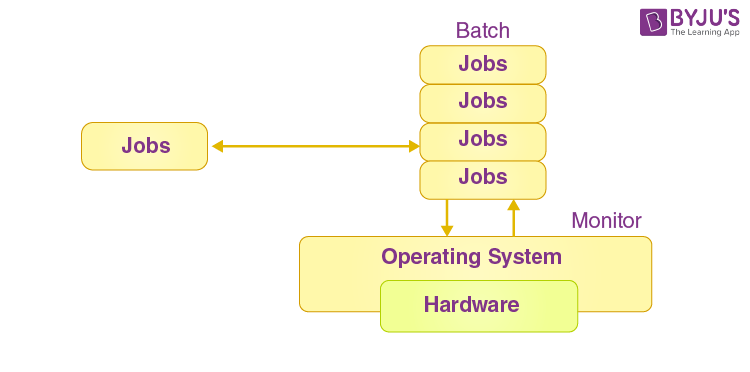
工程师们发明了一个叫做 Monitor 监控程序的常驻小软件。它的逻辑非常简单:
- 它始终停留在内存的一小块区域。
- 它负责读取磁盘上的下一个作业(Job)。
- 自动加载作业 $\rightarrow$ 运行作业 $\rightarrow$ 作业结束 $\rightarrow$ 把控制权还给 Monitor $\rightarrow$ 加载下一个。
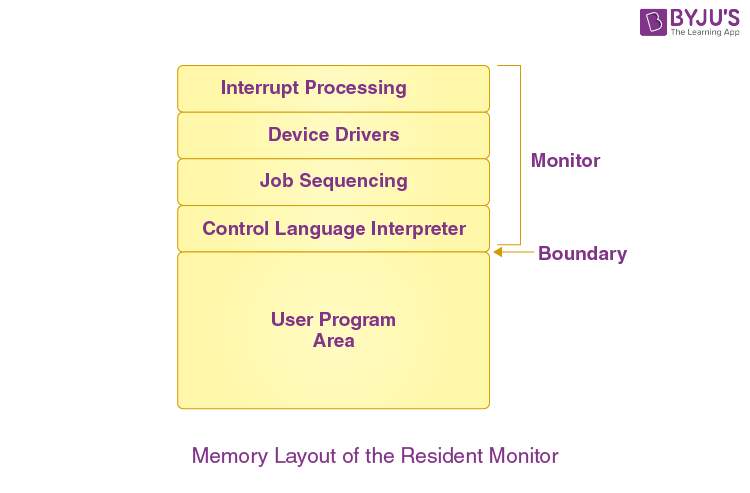
此时,依然没有进程的概念,只有作业(Job)。内存里依然一次只住一个程序。
2. 第二次进化:消除 I/O 的延迟 —— 多道程序设计
| 时间背景 | 代表 |
|---|---|
| 1960s 中期 | IBM OS/360 |
批处理虽然解决了人的问题,但没解决硬件的问题。即使是自动运行,当程序需要读取磁带或磁盘时,由于机械设备的物理限制,I/O 操作的速度比 CPU 慢了几个数量级(毫秒 vs 微秒)。
每当程序发起 I/O 请求(比如读取数据块),CPU 就不得不停下来傻等。这种等待在 CPU 眼里是极其漫长的。
为了解决 “I/O 太慢,CPU 等 I/O” 的矛盾,多道程序设计(Multiprogramming)横空出世。IBM 在其传奇的 Systen/360 大型机上大力推行这一概念。

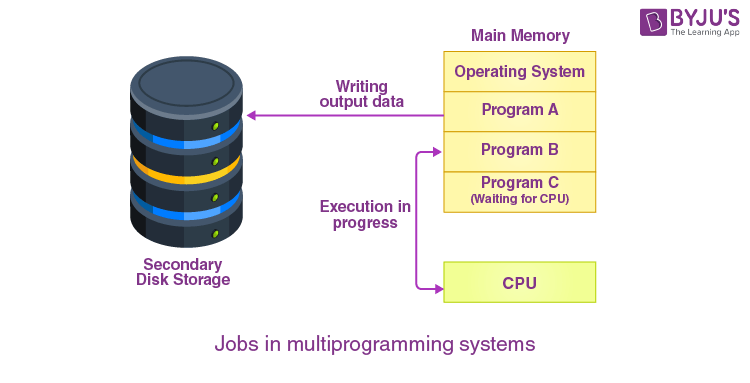
工程师们想出了一个绝妙的主意:既然内存变大了,为什么不一次性装入多个作业呢?
- 当 Job A 在等待磁带数据时(阻塞),操作系统把 CPU 切给 Job B 用。
- 当 Job B 也在等打印机时,再切给 Job C。
这一刻,计算机科学迎来了一个关键的转折点:为了在多个程序之间来回切换,我们需要保存每个程序的状态。
在 OS/360 中,出现了用来描述任务状态的数据结构 TCB(Task Control Block)。这正是后来 PCB(Process Control Block)的前身。
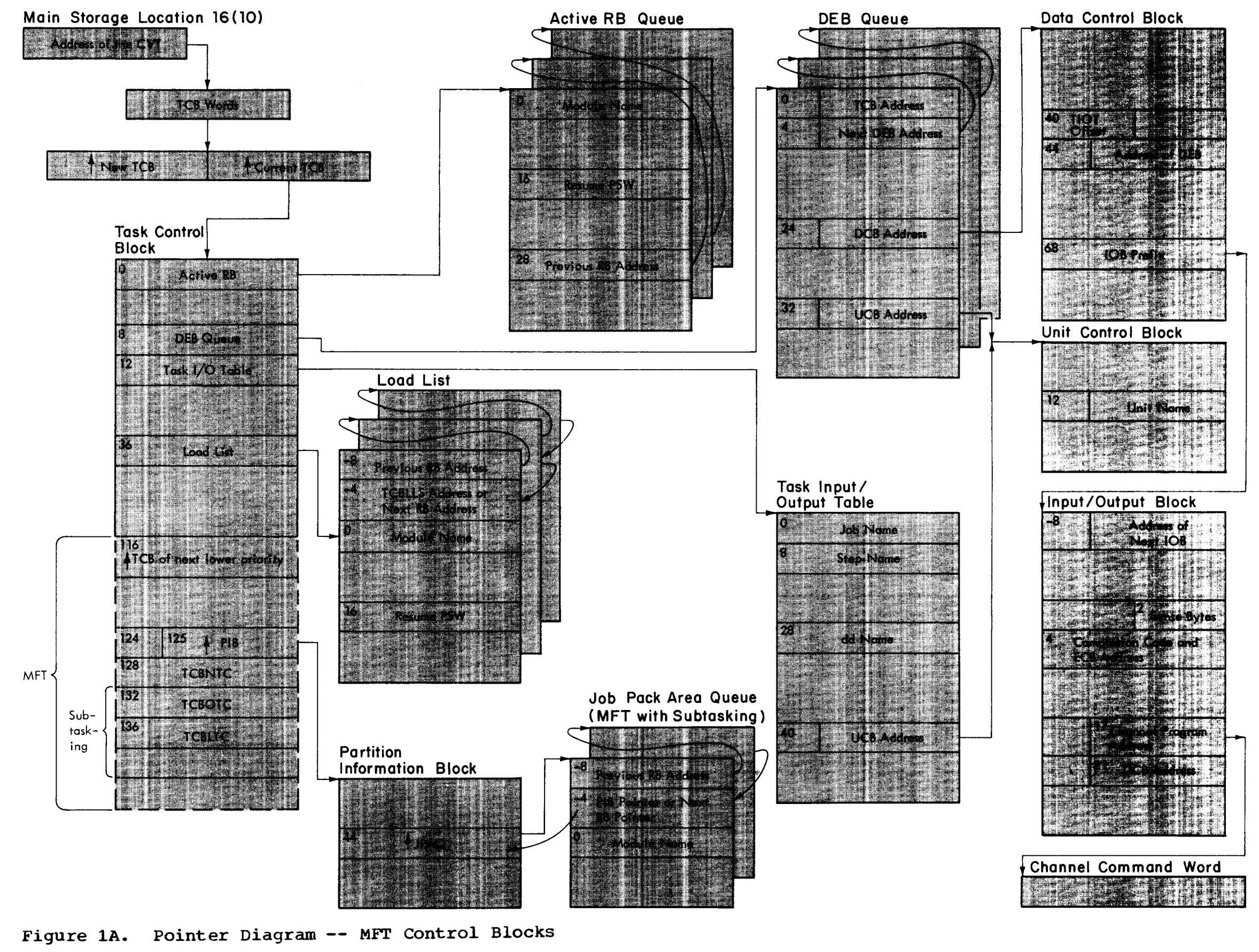
此时,TCB 主要完成两个任务:
- 现场保护:当 CPU 从 A 切到 B 时,A 的寄存器(算到一半的结果、程序计数器 PC 等)必须存进 TCB,否则下次回来状态就全部丢失了(因为寄存器只有一套)。
- 状态标记:系统需要记录谁在 Running,谁在 Waiting,谁已经 Ready。
3. 终极进化:以人为本 —— 分时系统与进程
| 时间背景 | 代表 |
|---|---|
| 1960s 晚期 - 1970 | Multics, Unix |
到了 60 年代末,计算机不再仅仅用于科学计算,人们开始通过终端(Teletype/屏幕/键盘)与计算机交互。如果继续沿用多道程序设计的逻辑(只有 I/O 阻塞才切换),会发生什么?
假设 Job A 中写了一个死循环 while(1) 且不进行 I/O,它将永远霸占 CPU。坐在终端前的用户 B 敲下键盘,屏幕毫无反应。这对于交互式系统是不可接受的。
为了解决 “响应时间太慢,用户体验差” 的矛盾,MIT、贝尔实验室和通用电气联合开发了 Multics(虽然它过于复杂,但其思想催生了后来的 Unix)。
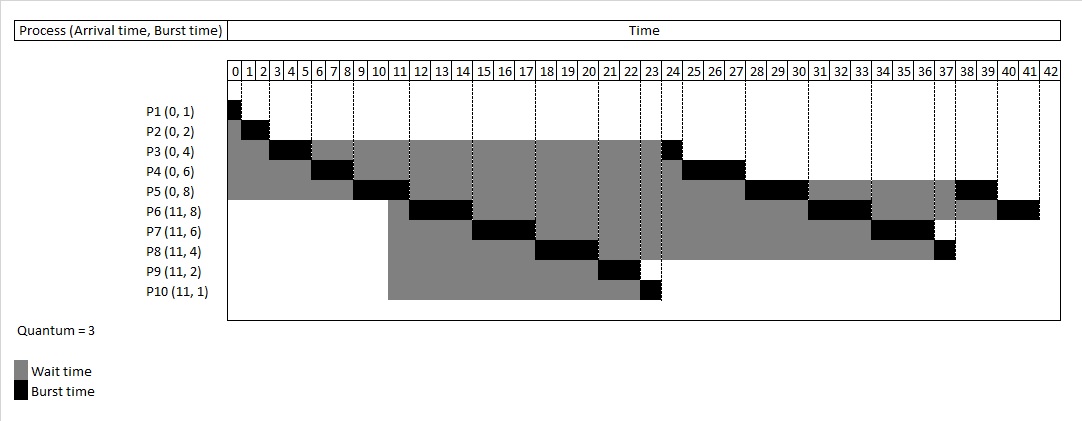
系统引入了硬件定时器。这一改变是革命性的:
- 抢占式调度(Preemptive):无论程序 A 是否运行完,每隔几十毫秒(一个时间片),操作系统强制打断它,保存上下文,把 CPU 扔给程序 B。
- 幻觉:这种快速的切换,让每个用户都产生了一种 “我独占了一台电脑” 的错觉。
也就是在这个时期,进程这个概念被正式确立,并赋予了现代含义。为了维持这种 “独占的幻觉”,操作系统构建了两道高墙:
- 时间的虚拟化:通过保存/回复 CPU 寄存器上下文,让每个进程觉得拥有独立的 CPU。
- 空间的虚拟化:通过 MMU(内存管理的单元)和页表,让每个进程觉得拥有独立的、连续的内存空间(虚拟内存)。
至此,进程不再仅仅是用户的代码,它是:
代码 + 动态执行上下文(某一时刻寄存器中的值)+ 虚拟地址空间
参考资料
本文参考了以下资料,排名无先后顺序:
- Timeline of operating systems - Wikipedia
- History of operating systems - Wikipedia
- ENIAC - Wikipedia
- John von Neumann - Wikipedia
- First Draft of a Report on the EDVAC - Wikipedia
- GM-NAA I/O - Wikipedia
- Resident monitor - Wikipedia
- Multics - Wikipedia
- Unix - Wikipedia
- Types of Operating Systems - BYJU’S
- IBM OS/360 System Control Blocks (PDF)
- Task Control Block - Wikipedia
- Round-robin scheduling - Wikipedia
Comments